Technical Documentation
The APX Automatic Control System provides hardware and flight controls abstraction layer for your Unmanned Vehicle, making it able to operate fully autonomous.
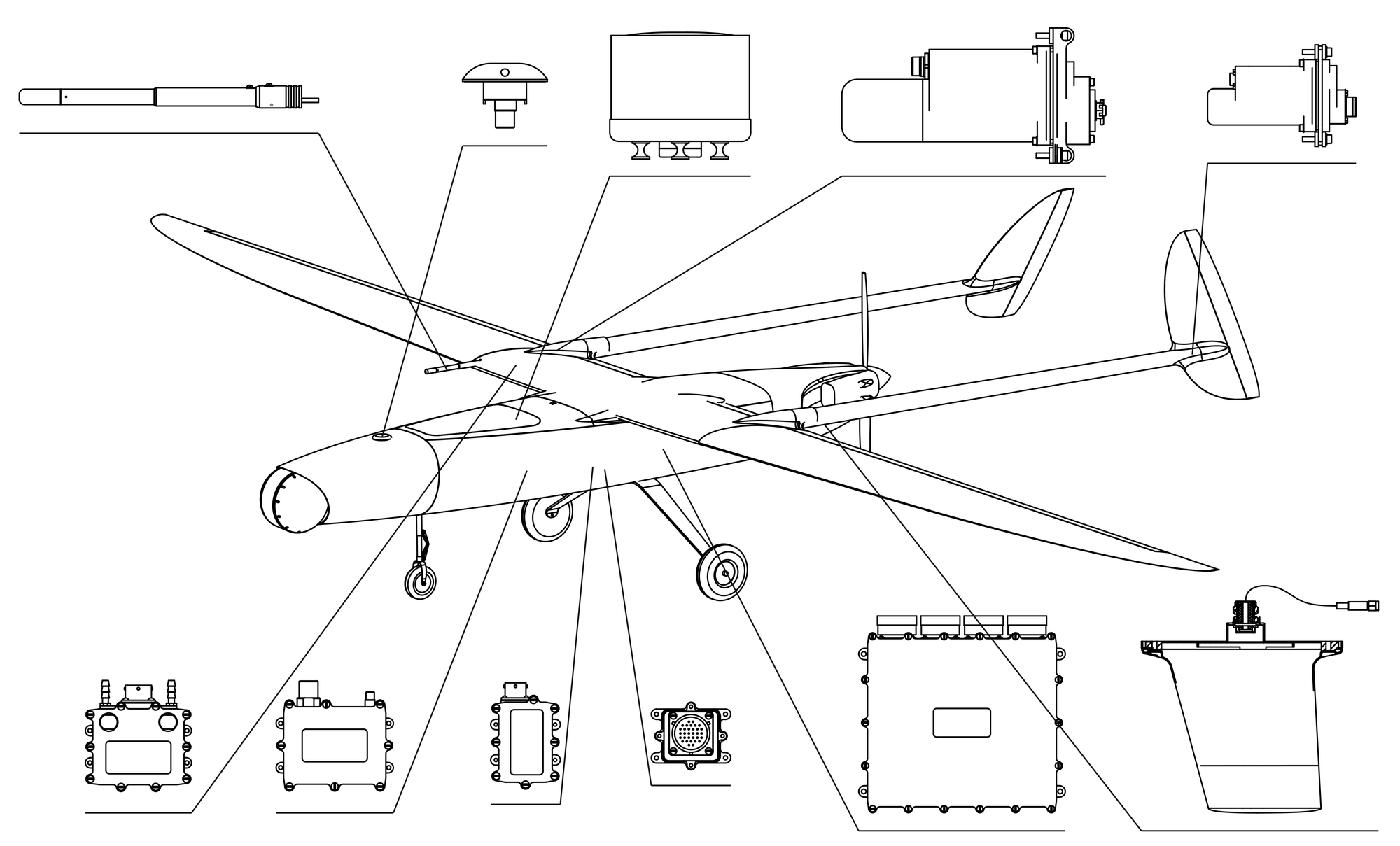
The system has distributed architecture, all nodes are linked together through Controller Area Network (CAN) interfaces. There may be several boards of the same type connected to the same system, making multiple levels of redundancy and provide overall scalability of the system.
The Ground Control Software is open source, but the Autopilot firmware is proprietary.
Ground Control
The Ground Control software is open source. The UI is fully customizable and uses modern Qt framework with exported QML and JavaScript engine. UAV communication protocols are defined through plug-ins.
Autopilot
Autopilot is capable to control almost any possible vehicle configuration (VTOLs, USVs, UGVs, etc.), including non-standard aircraft concepts. The flight control algorithm relies on Total Energy Control System (TECS) for improved reliability and sustainability to failures. Automatic landing with engine failures and auto-rotation for helicopters is fully supported.
Hardware
Thanks to its distributed architecture, the APX system can be used in vehicles from as small as quadcopter to big converted manned aircraft. The redundancy layers are provided as basic functionality. Any specific sensor or payload can be integrated by scripting custom protocols through onboard scripting engine.